ASY-CONT-600 Series Motion Controller
ASY-CONT-600 Series Motion Controller
Supplied across UK & Ireland through APC Technology Group.

ASY-CONT-600-16 is a PLC/FPGA (Programmable Logic Controller/Field Programmable Gate Array) based controller specially designed for antenna measurement applications. The controller allows for manual and automatic motion control of standard and customised multi-axis positioner systems and includes the functionality for fast, real-time control of the RF-instrumentation, such as Network Analysers, RF-switches, and electronically controlled antenna systems.
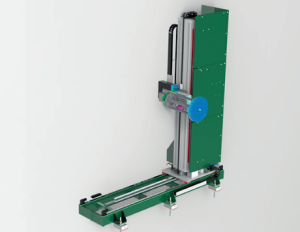
The ASY-CONT family of controllers form the core of a real-time distributed control system, where each positioner has its own drive. ASYSOL controllers provide flexibility and support for a variety of motors and position feedback systems. Depending on the requirements, servo, stepper, DC, AC or linear motors of any power level may be used. A variety of incremental and absolute encoders as well as dual loop control are supported.
Remote system diagnostics are supported. Firmware updates can be achieved remotely or by USB.
Supporting simultaneous movement of all axes allows for complex vector trajectories, complex position error correction scenarios and the optimisation of measurement speed. Both simultaneous and coordinated motion of multiple axes are supported.
Complex trigger and control signals for RF instrumentation, PIN switches or AUT systems can be based on the position of an axis or be time based. Trigger and control signal definitions can be updated while the system is in motion, and real-time control signals support timing tests of the RF instrumentation.
Full control can be transferred to a PC, laptop or tablet.